




A FAST car. All petrolheads want one, but few have the means to walk into a supercar dealership and put down a deposit. The next best thing is to modify your existing car. In this article, we investigate three performance modifications given theoretical targets.
Theoretical analysis
One person’s definition of a fast car may differ dramatically from the next. It all depends on the intended application (for example, drag or track racing). For the purpose of this exercise, we look at the straight-line performance building blocks of a vehicle in the following categories: acceleration, braking and top speed.
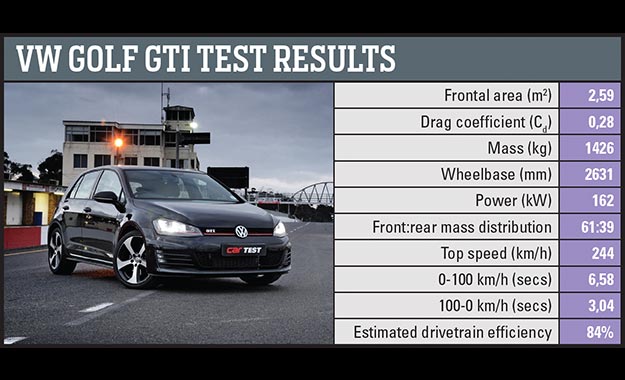
The vehicle chosen for this theoretical exercise is a 2013 Volkswagen Golf 7 GTI. This vehicle forms the basis of the performance calculations and comparisons.
0-100 km/h target: 4,0 secs
Newton’s Second Law states: the acceleration of a body is directly proportional to, and in the same direction as, the net force acting on the body, and inversely proportional to its mass. Thus, F = ma, or a = F/m, where F = force (N), m = mass (kg) and a = acceleration (m/s2).
The force that accelerates the vehicle acts between the driven wheels and the road surface. It is a function of the normal force between the tyre, road and friction coefficient. The tractive force is a result of torque provided by the engine.
The maximum acceleration of a vehicle is limited either by engine power or grip (see Theoretical acceleration in the January 2012 issue). Owing to the mass transfer during acceleration, front-wheel-driven cars tend to be grip-limited, whereas rear-wheel-drive and especially all-wheel-drive cars are mostly power-limited.
To get the GTI to 100 km/h in 4,0 seconds, we considered the following options:
| Performance parameters | Drive wheels | Power (kW) | Acceleration | 0-100 km/h (secs) |
|---|---|---|---|---|
| Standard car (tested) | front | 162 | power | 6,58 |
| Increased power | front | 230 | grip | 5,70 |
| AWD | all | 327 | power | 4,00 |
| AWD and unlimited power | all | unlimited | grip | 2,83 |
Assumptions: level road at sea level, drivetrain losses including rolling resistance equals 16%, aerodynamic forces ignored as vehicle speed is relatively low, rotational inertias ignored and friction coefficient between the tyre and road surface of one used and only
a constant average acceleration from 0 to 100 km/h considered (no spikes).
It’s evident that a front-wheel-drive Golf would not be able to accelerate faster to 100 km/h than approximately 5,70 seconds owing to a grip limitation on the front wheels. To get down to 5,70 seconds, the engine power has to be increased to about 230 kW – any excessive power will be wasted on wheelspin.
The answer is to add all-wheel drive and more power. Calculations show that 327 kW would be needed to get the all-wheel-drive Golf to 100 km/h in 4,0 seconds. If unlimited power was available, the GTI with AWD will be able to reach 100 km/h in about 2,83 seconds.
See “Main equations used” above.
100-0 km/h braking target: 2,0 secs
Braking is the opposite of acceleration, with similar equations applying. A modern vehicle like the GTI has ABS that can control the optimal braking force on each wheel to approach the tyres’ friction limit. In this case, the braking force (opposite of tractive force) is as a result of the friction between the brake pads and discs on all four wheels. As downforce has limited effect below 100 km/h, the only variable with which we can play is the friction coefficient of the tyres (see assumptions):
| Performance parameters | Friction coefficient | Distance to stop from 100 km/h (meters) | 0-100 km/h (secs) | |
|---|---|---|---|---|
| Idealised standard tyres | 1 | 39,33 | 2,83 | |
| High-performance road tyres | 1,1 | 38,24 | 2,75 | |
| Race slicks | 1,5 | 28,01 | 2,02 |
Assumptions: level road, ignore aerodynamic forces, ABS can brake each wheel at the friction limit of all tyre choices and constant coefficient of friction applies.
Top speed target: 320 km/h
The biggest force that opposes a vehicle at speed on a flat road is aerodynamic drag. There are other drivetrain losses that sap engine power, such as gear sets, bearings, CV shafts, brake drag and rolling resistance. However, their impact is much smaller; we used a drivetrain-loss percentage as simplification (see assumptions). The following options are possible if only one parameter is changed at a time:
| Performance parameters | Drag coefficient | Frontal area (m2) | Engine power (kW) | Top speed (km/h) |
|---|---|---|---|---|
| Standard car (tested) | 0,28 | 2,59 | 162 | 244 |
| Increased power | 0,28 | 2,59 | 365 | 320 |
| Modified drag coefficient | 0,124 | 2,59 | 162 | 320 |
| Modify frontal area | 0,28 | 1,15 | 162 | 320 |
Assumptions: level road at sea level, drivetrain losses including rolling resistance equals 16%, aerodynamic drag around wheels ignored and gearing sufficient so that peak power available at 320 km/h.
Obviously, the changes in drag coefficient and frontal area are far-fetched, but in lowering each by 10%, the power requirement from the engine drops to 296 kW to reach 320 km/h.
See “Main equations used” above.
The Future
Today’s performance vehicles approach the physical limits of current-production tyres and their longitudinal and lateral-acceleration capabilities. To break into a new level of performance, we would need either downforce (which is difficult at legal road speeds) or tyres with higher coefficients of friction. The tyres used by Top Fuel dragsters have a friction coefficient of four compared with a road tyre’s coefficient of one. Obviously, our tyres need to last further than 400 metres, but that is the only way we will be able to unleash more power (accelerating or braking) to the road, which by default will increase the possible top speed, too.