





Not all 4×4 setups are created equal. We investigate the crucial differences and how they impact your driving on-road and off…
Four-wheel drive. All-wheel drive. Part- or full-time systems. The terminology can be confusing, especially when you add brand-specific names such as Quattro, 4Motion and 4Matic. Basically, the one shared goal of all these systems is to provide motive force (torque) on each of the four wheels to increase traction. Here we look at the different methods of transferring engine torque to the wheels.
AWD history
The first four-wheel-drive vehicle with an internal-combustion engine was also the first hybrid. Ferdinand Porsche designed and built the Lohner-Porsche for Ludwig Lohner in Vienna in 1899 and it featured four electric hub motors powering each wheel, with the petrol engine fulfilling a generator function.
The first four-wheel-drive car with an internal-combustion engine powering the wheels mechanically was the Spyker 60HP developed for the Paris to Madrid race in 1903 by Jacobus and Hendrik-Jan Spijker of the Netherlands.
Although a couple of military four-wheel-drive vehicles were also developed, the first mass-production, four-wheel-drive vehicle was the 1945 Jeep CJ-2A (“CJ” name stands for Civilian Jeep).
It took a long time for all-wheel drive to reach mass production in passenger vehicles and this claim goes to 1972’s Subaru Leone. The Audi Quattro followed in 1980 and revolutionised rallying; no two-wheel-drive vehicle has managed to win the World Rally Championship since the Quattro became the first four-wheel drive champ in 1983 (driven by Hannu Mikkola).
The basics
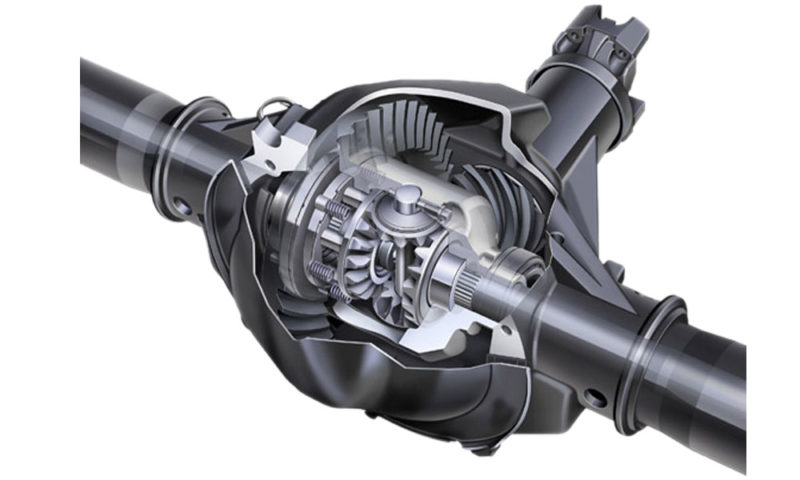
The torque moment for propulsion is provided at the crankshaft of the internal-combustion engine. This torque is then sent through the transmission, where the reduction ratios (lower gears) serve as torque multipliers (with low range adding another reduction ratio to the complete gear set). The multiplied torque value is now available at the transmission-output shaft before reaching all four wheels of the vehicle. That implies that they are somehow all connected to the output of the transmission, but we’ll clarify this point later.
The problem is that all four wheels do not rotate at the same speed, especially when rounding a bend, where the inside wheels travel a shorter distance than the outside ones. The component on the front and rear axles that is designed to cope with the speed variation is known as a differential. Therefore, all four-wheel-drive vehicles need at least two differentials; one fore, and one aft.
Lastly, the two propshafts (or driveshafts) that send the torque to the front and rear axles may also spin at different speeds depending on the average of the wheel speeds on each axle. Therefore, either another device is needed to cater for this difference, or the vehicle can be driven only on low-friction surfaces in four-wheel drive where slip can occur between wheels and the surface to avoid drivetrain wind-up and subsequent damage.
Types of AWD systems
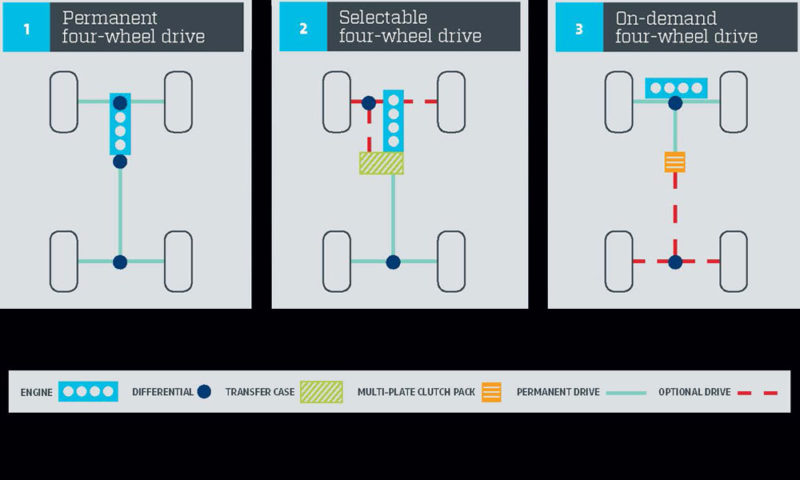
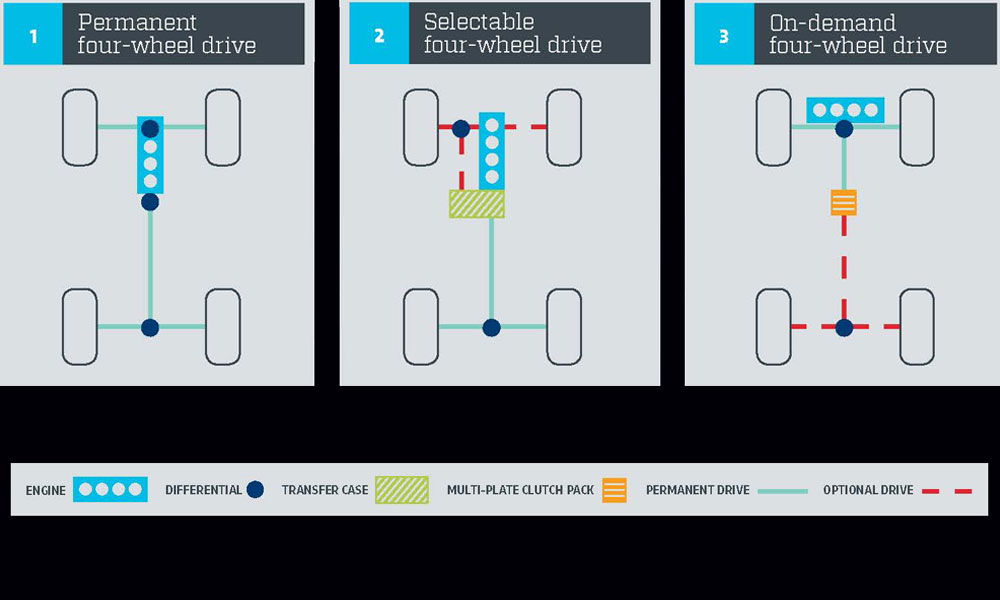 1. Permanent four-wheel drive
1. Permanent four-wheel drive
When the system delivering drive to all four wheels is permanently active, there must be a centre differential to cater for the speed differences between the two axles. This is because the driver does not have the option to disengage AWD when operating on high-friction surfaces such as tar.
Key attributes: Three differentials, one on each axle and a centre unit. The engine can be transversely or longitudinally mounted.
Tar use: Can be used on tar roads as long as all three differentials are “open” and not locked (see What is a diff lock?).
Options: Diff locks can be present at all three differentials. Low range is a possibility for off-road vehicles.
Examples: Subaru is known for its symmetrical all-wheel-drive system coupled with boxer engines and equal-length driveshafts. An off-roader example is the defunct Land Rover Defender, also with three differentials and low range. Interestingly, the Defender has a diff lock only on the centre differential as standard, although many owners fit a limited-slip diff or locking diffs to the front- and rear-axle units.
2. Selectable four-wheel drive
This type of system is more suited to proper off-road use, with a mechanical central transfer case and low range sending drive equally to the front and rear axles in the four-wheel-drive modes.
Key attributes: Usually only two differentials (one on each axle); longitudinally mounted engine; transfer case with low range; default rear-wheel drive when 4×4 is not selected. Fuel is saved in two-wheel drive owing to less frictional losses.
Tar use: Not recommended in 4×4 modes, except if the vehicle is fitted with a centre differential that is open.
Options: Diff locks on the front and rear axles (and centre diff, if fitted). Low range is usually standard fitment;
Examples: The Toyota Hilux is a good example of a vehicle with a transfer case that includes low range but no centre differential. An exception in this category is the Mitsubishi Triton that has a central Torsen differential that is open in four-wheel-drive high range (4H) and can therefore be driven on tar in this mode. Do not attempt this in 4HLc (or low range; 4LLc), where the centre diff is locked.
3. On-demand four-wheel drive
This system is found on many performance-oriented road cars and tar-biased SUVs. The idea is for the vehicle to run as default two-wheel drive – FWD in most cases – and then (automatically) engage four-wheel drive only when needed.
Key attributes: Usually transverse mounted engine; two differentials (one on each axle); multi-plate clutch or viscous-coupling central unit. As the system is active only when needed, fuel is saved as frictional losses are less. Low range is rarely found in this segment.
Tar use: The system has no problems operating on tar, as it shifts to four-wheel-drive solely when slip is detected on the driven (mostly front) wheels. When engaged, the clutch or viscous coupling can still take up slight speed differences by allowing a degree of slip (as well as altering the torque distribution front to rear).
Options: Diff locks are usually not offered and the driver has little control over the four-wheel-drive system’s operation.
Examples: The Mercedes-AMG A45 has a Haldex central multiplate clutch to engage the rear wheels for traction purposes when all 280 kW is let loose. The Nissan X-Trail, meanwhile, has a similar setup, but allows the driver to choose between FWD (open clutch), auto (ECU-controlled clutch) or 4×4 (clutch permanently engaged) modes.
What is a diff lock?
A differential consists of a planetary gear set that also acts as the final reduction ratio to multiply the torque value while decreasing the rotational-input speed to the wheels by the same factor. An open differential allows an unlimited speed difference between the two wheels on the driven axle for cornering purposes. This can lead to a traction problem when, for example, a wheel is stationary on solid ground and the other spins in mud. A diff lock forces both wheels to rotate at the same speed, improving traction but negatively impacting cornering dynamics. Driving with a diff lock engaged on tar can lead to drivetrain wind-up and severe damage. A limited-slip differential allows a certain amount of wheel-speed variation on an axle before limiting slip and improving traction.
A limited-slip diff allows wheel-speed variation on an axle
Electric AWD
Engineering four-wheel drive on an electric vehicle (EV) is much simpler than the mechanical setups explained in these pages. If four electric motors are employed – one a wheel – it negates the need for transmissions, differentials and transfer cases. The tech has been in use for a long time in mining, where large trucks (and other earth movers) run with an electric motor powering each wheel (or axle). These trucks employ an internal-combustion engine as a generator, similar in concept to the Lohner-Porsche.
Today, many performance-oriented EVs, such as the Tesla Model S, use an electric motor per axle to achieve permanent four-wheel drive.



